
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
Tags
- 성능지표
- MySQL 세팅
- href
- Action
- Django
- jinja2
- 튜토리얼
- 실시간 시계
- #ifndef
- heroku
- bootstrap4 패키지
- PyQt5
- 명령어
- bootstrap
- javascript
- #undef
- #ifdef
- #endif
- DB 데이터
- VS Code
- OpenCV
- DB 데이터 저장
- 사이트 도메인
- #else
- 환경변수 설정
- 콘솔 가상환경 # 콘솔 #가상환경
- OpenCV + Flask
- flask
- openweathermap
- #if
Archives
- Today
- Total
PROGRAMMING
초점 거리(f : Focal length), 피사계심도(DOF) 본문
1. 초점 거리
: F 뒤에 들어오는 숫자의 값이 낮을수록 어두워진 공간에서도 카메라로 주사를 시킬 수 있다.


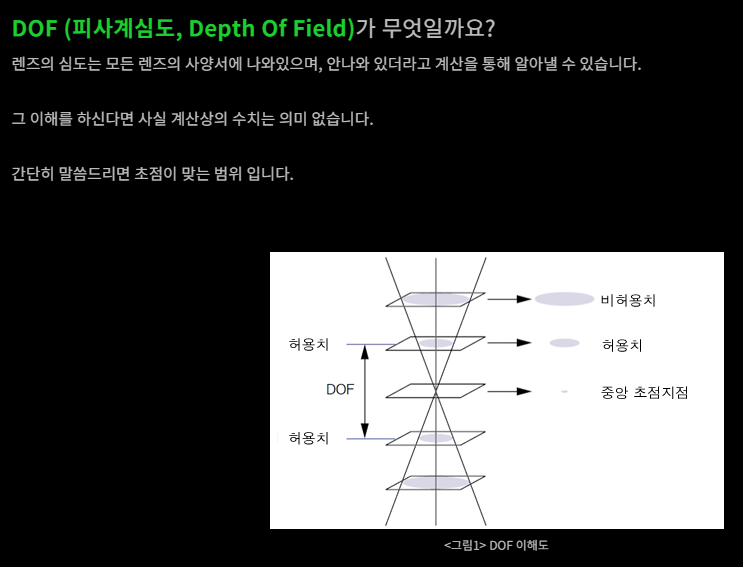
2. 피사계심도(DOF)
: 렌즈가 피사하여 받아들이는 이미지에 대해 오브젝트로 설정된 이미지가 가지는 깊이가 있을 경우 깊이가 어느정도 선 이상이 되면 잡지 못하게 되는데 이를 측정하는 척도가 피사계심도입니다.
즉, 오브젝트의 깊이가 깊은데 피사계심도가 낮을 경우, 깊이가 깊은 쪽에 속하는 물체에 관하여서는 흐린 이미지를 반환하기 때문에 원하는 이미지를 도출할 수 없을 수 있습니다.
'OpenCV > 머신비전' 카테고리의 다른 글
| 해상도, 색상채널 (0) | 2020.12.12 |
|---|---|
| 조명 (0) | 2020.12.10 |
| 카메라 종류, 셔터, 마운트 (0) | 2020.12.10 |
| 주사 방식, 머신비전 렌즈 (0) | 2020.12.10 |
| 센서 사이즈, 인터페이스 (0) | 2020.12.10 |
'OpenCV/머신비전' Related Articles
more




Comments